Below are all the blog posts, from latest to earliest. You can also view them categorized in the Blog Archive.
- 2024 In Review: Return Of The Research Software Engineer
 Sebastian summarizes his open-source and community contributions in 2024 and reflects on returning to support robotics research after years of software engineering experience.
Sebastian summarizes his open-source and community contributions in 2024 and reflects on returning to support robotics research after years of software engineering experience. - ROSCon 2024: Highlights from Odense
 Read about Sebastian’s experiences at ROSCon 2024 in Odense, Denmark.
Read about Sebastian’s experiences at ROSCon 2024 in Odense, Denmark. - Advice to Young Engineers
 With so much access to information and people online, it can be overwhelming as an aspiring engineer to navigate the landscape and form your career. This post provides some advice to help you focus on the right things and to listen to the right people.
With so much access to information and people online, it can be overwhelming as an aspiring engineer to navigate the landscape and form your career. This post provides some advice to help you focus on the right things and to listen to the right people. - How Do Robot Manipulators Move?
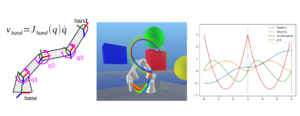
 This article describes all the components needed to build a motion planning stack for a robot manipulator. You will learn the basics of inverse kinematics, motion planning, and trajectory generation, as well as model representations and common software packages you should know about.
This article describes all the components needed to build a motion planning stack for a robot manipulator. You will learn the basics of inverse kinematics, motion planning, and trajectory generation, as well as model representations and common software packages you should know about. - 2023 In Review: Senior Engineer
 Sebastian summarizes his open-source and community contributions in 2023 and reflects on his experience as a senior engineer at a small company with an open-core model.
Sebastian summarizes his open-source and community contributions in 2023 and reflects on his experience as a senior engineer at a small company with an open-core model. - An Updated Guide to Docker and ROS 2
 This post introduces best practices for using use Docker with ROS 2. This includes multi-stage builds, working graphics in containers, Docker Compose, and developer containers.
This post introduces best practices for using use Docker with ROS 2. This includes multi-stage builds, working graphics in containers, Docker Compose, and developer containers. - 2022 in Review: The Year of ROS 2
 Welcome to my 2022 recap. This year was quite busy — a little too busy, actually — and as such went by extremely quickly. I had the privilege of being featured in two video series this past year. First was the Learn Robotics and AI podcast episode hosted by Chandandeep Singh, whichContinue reading “2022 in Review: The Year of ROS 2”
Welcome to my 2022 recap. This year was quite busy — a little too busy, actually — and as such went by extremely quickly. I had the privilege of being featured in two video series this past year. First was the Learn Robotics and AI podcast episode hosted by Chandandeep Singh, whichContinue reading “2022 in Review: The Year of ROS 2” - Integrated Task and Motion Planning in Robotics
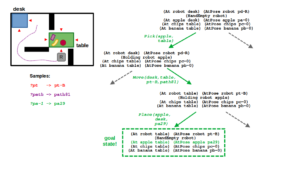
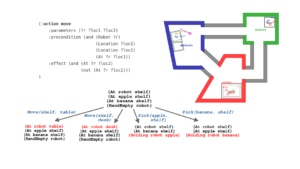
 Learn the fundamentals of integrated task and motion planning (TAMP), and explore examples using PDDLStream, which combines symbolic task planning and sampling-based motion planning.
Learn the fundamentals of integrated task and motion planning (TAMP), and explore examples using PDDLStream, which combines symbolic task planning and sampling-based motion planning. - Task Planning in RoboticsLearn the fundamentals of task planning for robotics applications, with a focus on Planning Domain Definition Language (PDDL).
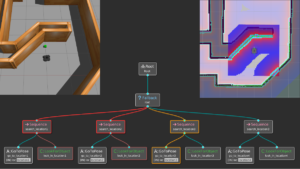
- Building a Python Toolbox for Robot Behavior
 Find out about the initial development of pyrobosim: A ROS2 enabled 2D mobile robot simulator for behavior prototyping.
Find out about the initial development of pyrobosim: A ROS2 enabled 2D mobile robot simulator for behavior prototyping. - 2021 In Review, Part 2: A Career Stretch
 Sebastian discusses the career path that led him to work on the Stretch robot at Boston Dynamics, and highlights the differences between this job and his previous roles.
Sebastian discusses the career path that led him to work on the Stretch robot at Boston Dynamics, and highlights the differences between this job and his previous roles. - 2021 in Review, Part 1: Research Projects at MIT CSAIL
 Sebastian discusses 3 of his major collaborative projects at MIT CSAIL, which focus on learning and planning under uncertainty.
Sebastian discusses 3 of his major collaborative projects at MIT CSAIL, which focus on learning and planning under uncertainty. - Introduction to Behavior TreesThis post introduces behavior trees for designing and managing the execution of complex behaviors in autonomous systems. This includes robotics examples, software library recommendations, and comparisons to finite-state machines.
- A Guide to Docker and ROSLearn best practices for using Docker in container-based development in robotics workflows including the Robot Operating System (ROS).
- 2020 in Review: Home Service Robotics at MIT CSAIL
 Learn about Sebastian’s major project of 2020 at MIT CSAIL. This consists of a task and motion planning framework for a mobile manipulation platform for home service robotics.
Learn about Sebastian’s major project of 2020 at MIT CSAIL. This consists of a task and motion planning framework for a mobile manipulation platform for home service robotics. - Object Detection and Instance Segmentation with Detectron2Learn how to use the Detectron2 library to train object detection and instance segmentation models on your own dataset.
- Reinforcement Learning: Looking Ahead and Getting StartedGet a brief overview of topics in reinforcement learning such as multi-agent methods, practical issues, and active areas of research. Also find educational resources to get started with reinforcement learning theory and code.
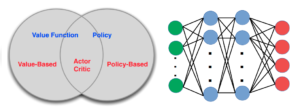
- Introduction to Deep Reinforcement LearningLearn how deep neural networks have transformed the field of reinforcement learning by exploring some of the popular value-based, policy gradient, and actor-critic methods.
- An Intuitive Guide to Reinforcement LearningGet an overview of traditional reinforcement learning techniques for tabular environments consisting of finite sets of discrete states and actions.
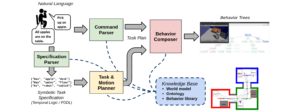
- Introduction to Natural Language ProcessingA high-level overview of Natural Language Processing (NLP), with a focus on rule-based and statistical (machine learning) systems for understanding text.
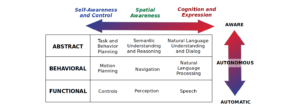
- Anatomy of a Robotic SystemLearn about all the types of skills that make up a capable robotic system.
- Continuous Integration with GitHub, Docker, and JenkinsLearn the basics of continuous integration software practices with an example using GitHub, Docker, and Jenkins.
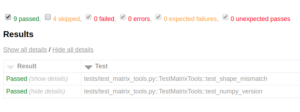
- Testing Python CodeGet an overview of testing techniques and tools for Python code.
- Managing Your Python Environment
 Learn the basics of managing your Python development environment.
Learn the basics of managing your Python development environment. - The Best Programming Languages for Robotics
 Learn about Sebastian’s top programming languages for robotics.
Learn about Sebastian’s top programming languages for robotics.















Subscribe to this blog to receive updates about new posts.
Contact me if you have post ideas, questions, or other feedback.