
Singapore is hot. Even though I grew up in Jamaica, I’ve been in the northeast USA for 19 years (!!!) and can confidently say I forgot how to manage the heat. So, I’ve decided to sit in the nice hotel air conditioning in the middle of the day to bring you a fresh recap ofContinue reading “ROSCon 2025: Highlights from Singapore”
Category Archives: Artificial Intelligence
Integrated Task and Motion Planning in Robotics
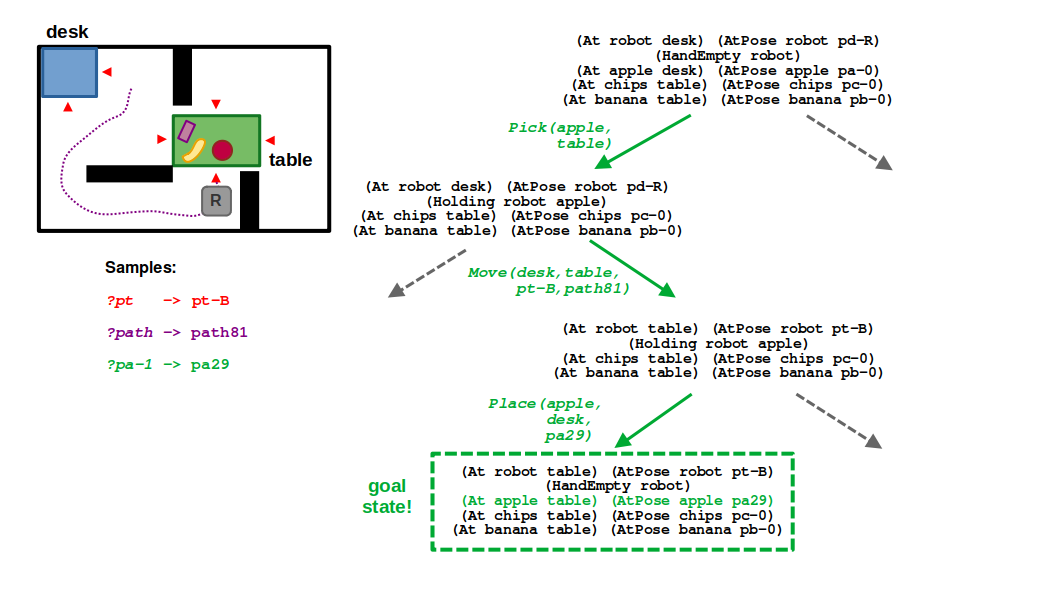
Learn the fundamentals of integrated task and motion planning (TAMP), and explore examples using PDDLStream, which combines symbolic task planning and sampling-based motion planning.
Task Planning in Robotics
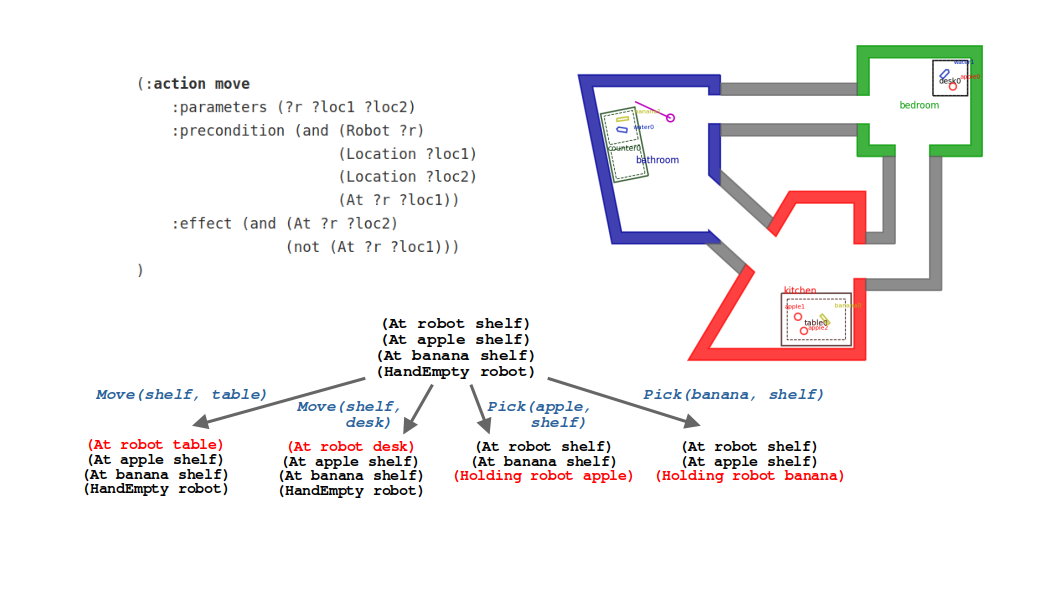
Learn the fundamentals of task planning for robotics applications, with a focus on Planning Domain Definition Language (PDDL).
2021 in Review, Part 1: Research Projects at MIT CSAIL
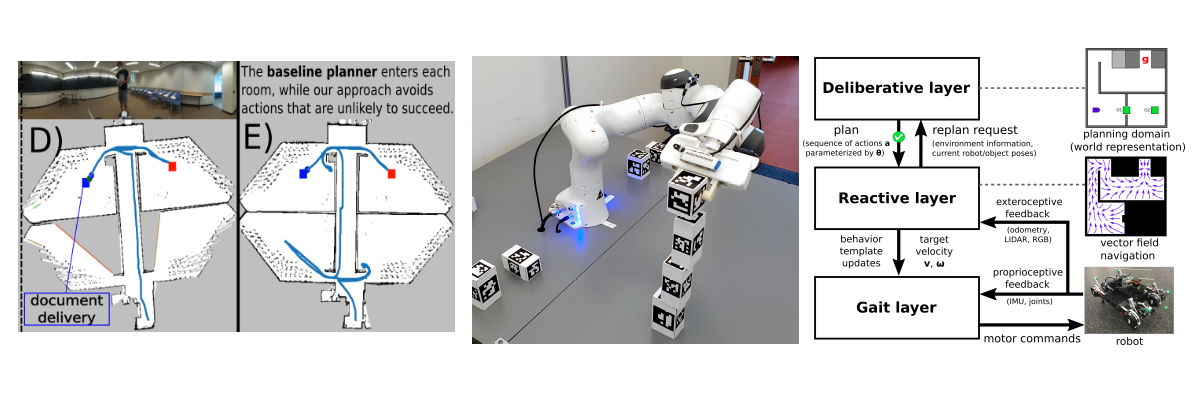
Sebastian discusses 3 of his major collaborative projects at MIT CSAIL, which focus on learning and planning under uncertainty.
Introduction to Behavior Trees

This post introduces behavior trees for designing and managing the execution of complex behaviors in autonomous systems. This includes robotics examples, software library recommendations, and comparisons to finite-state machines.
Object Detection and Instance Segmentation with Detectron2

Learn how to use the Detectron2 library to train object detection and instance segmentation models on your own dataset.
Reinforcement Learning: Looking Ahead and Getting Started
Get a brief overview of topics in reinforcement learning such as multi-agent methods, practical issues, and active areas of research. Also find educational resources to get started with reinforcement learning theory and code.
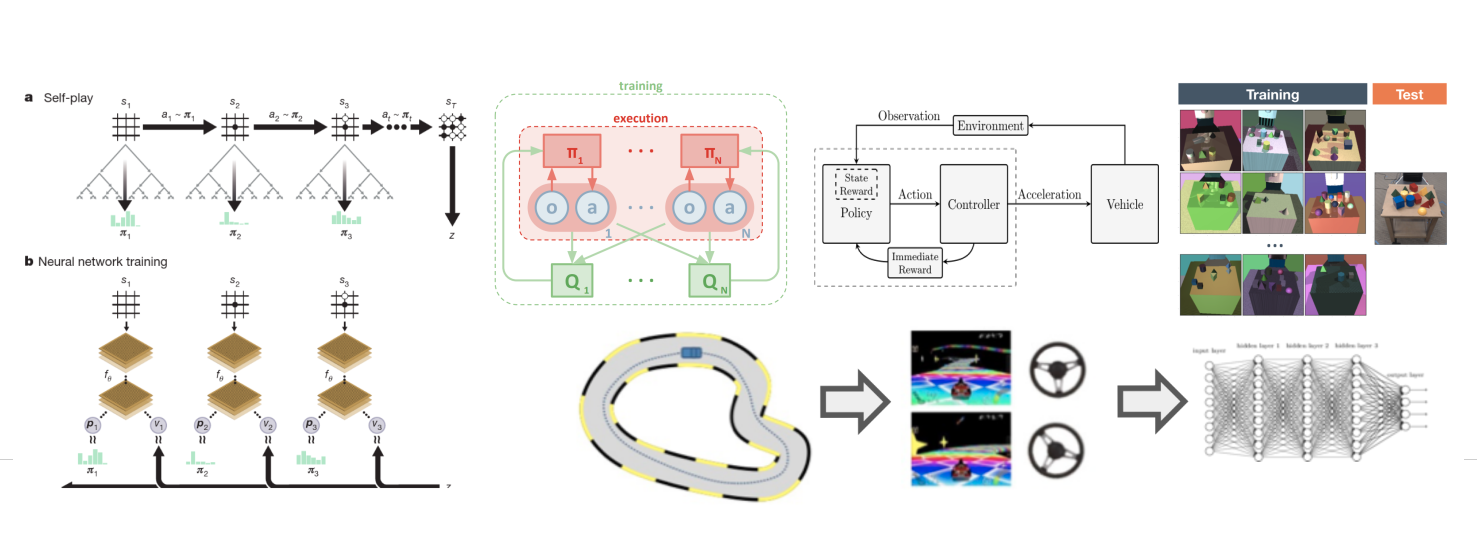
Introduction to Deep Reinforcement Learning
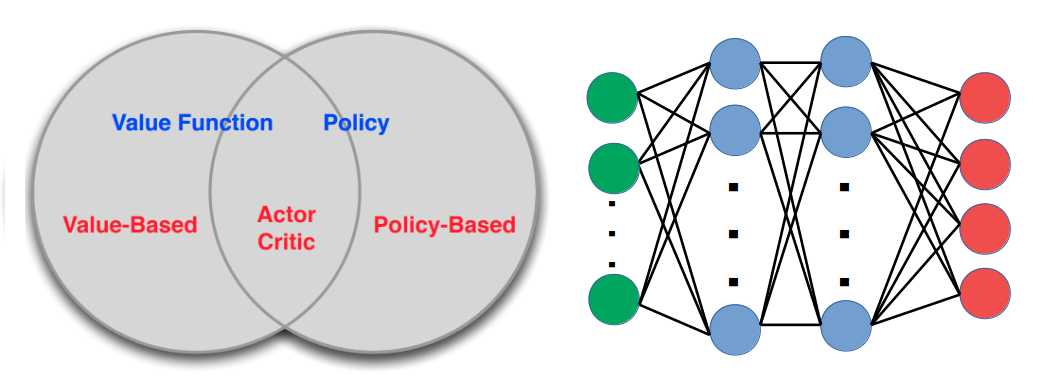
Learn how deep neural networks have transformed the field of reinforcement learning by exploring some of the popular value-based, policy gradient, and actor-critic methods.
An Intuitive Guide to Reinforcement Learning
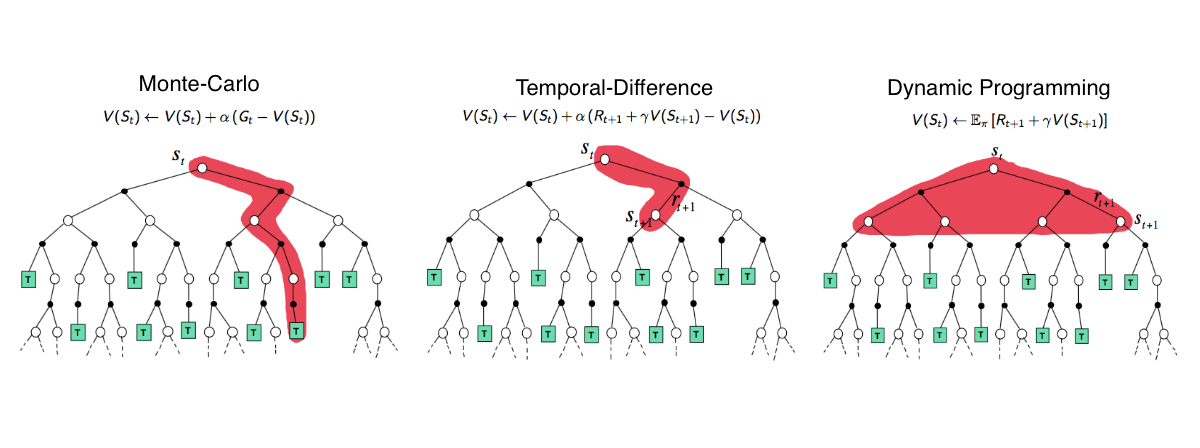
Get an overview of traditional reinforcement learning techniques for tabular environments consisting of finite sets of discrete states and actions.
Introduction to Natural Language Processing
A high-level overview of Natural Language Processing (NLP), with a focus on rule-based and statistical (machine learning) systems for understanding text.