
Sebastian summarizes his work in 2025, highlighting presentations, open-source contributions, and a salient theme of developer experience in robotics software.
Author Archives: Sebastian Castro
ROSCon 2025: Highlights from Singapore

Singapore is hot. Even though I grew up in Jamaica, I’ve been in the northeast USA for 19 years (!!!) and can confidently say I forgot how to manage the heat. So, I’ve decided to sit in the nice hotel air conditioning in the middle of the day to bring you a fresh recap ofContinue reading “ROSCon 2025: Highlights from Singapore”
2024 In Review: Return Of The Research Software Engineer

Sebastian summarizes his open-source and community contributions in 2024 and reflects on returning to support robotics research after years of software engineering experience.
ROSCon 2024: Highlights from Odense

Read about Sebastian’s experiences at ROSCon 2024 in Odense, Denmark.
Advice to Young Engineers
With so much access to information and people online, it can be overwhelming as an aspiring engineer to navigate the landscape and form your career. This post provides some advice to help you focus on the right things and to listen to the right people.
How Do Robot Manipulators Move?
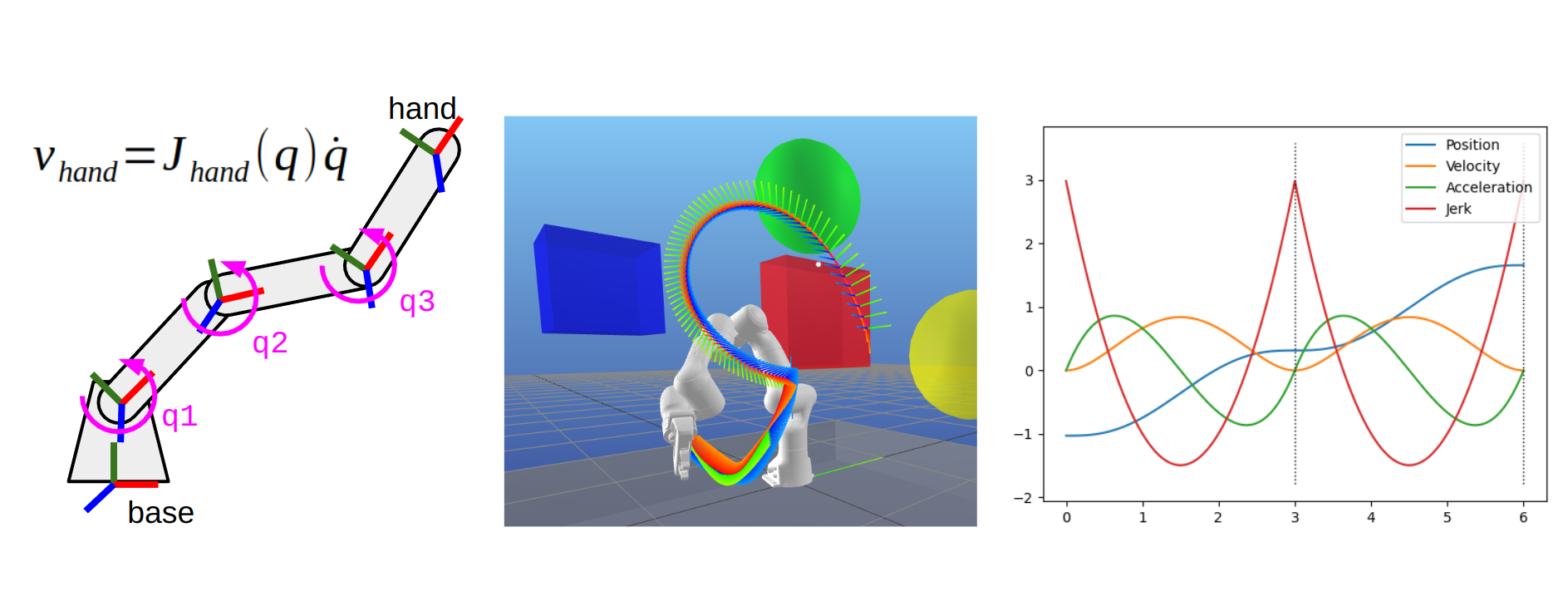
This article describes all the components needed to build a motion planning stack for a robot manipulator. You will learn the basics of inverse kinematics, motion planning, and trajectory generation, as well as model representations and common software packages you should know about.
2023 In Review: Senior Engineer
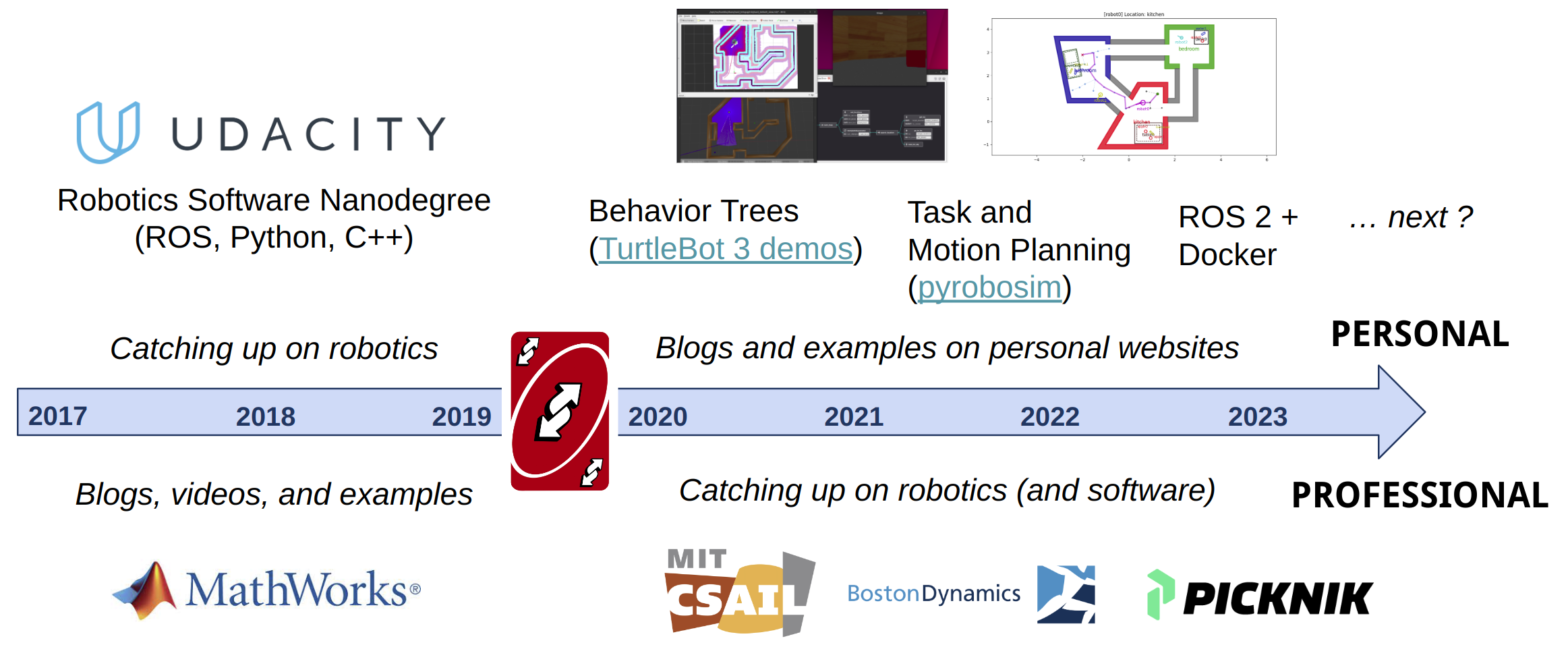
Sebastian summarizes his open-source and community contributions in 2023 and reflects on his experience as a senior engineer at a small company with an open-core model.
An Updated Guide to Docker and ROS 2

This post introduces best practices for using use Docker with ROS 2. This includes multi-stage builds, working graphics in containers, Docker Compose, and developer containers.
2022 in Review: The Year of ROS 2
Welcome to my 2022 recap. This year was quite busy — a little too busy, actually — and as such went by extremely quickly. I had the privilege of being featured in two video series this past year. First was the Learn Robotics and AI podcast episode hosted by Chandandeep Singh, which was recorded atContinue reading “2022 in Review: The Year of ROS 2”
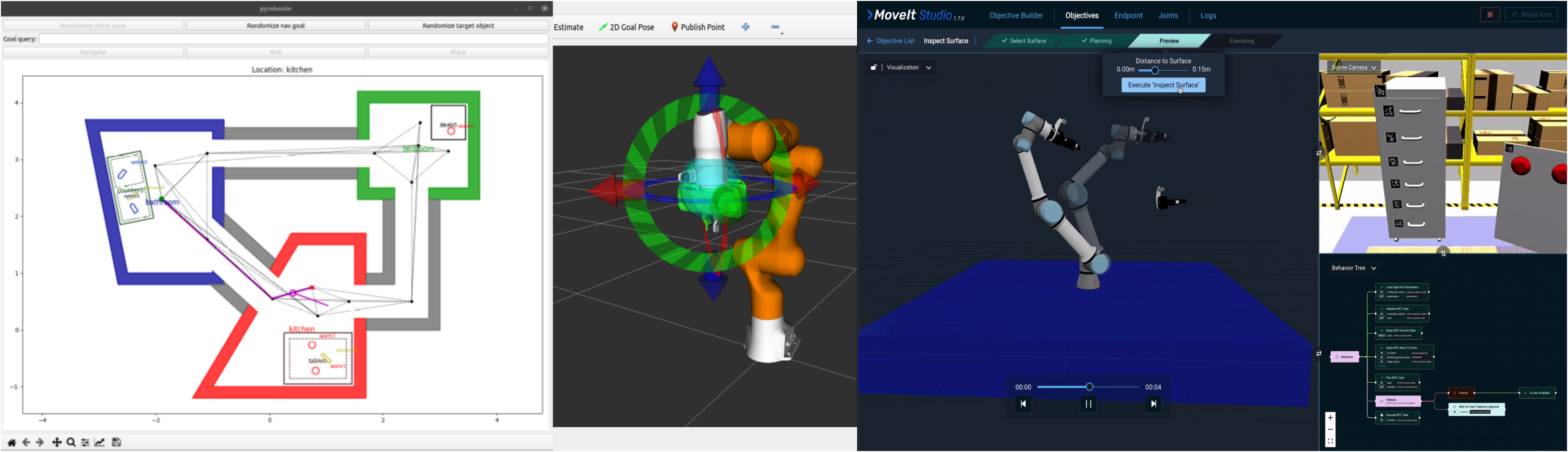
Integrated Task and Motion Planning in Robotics
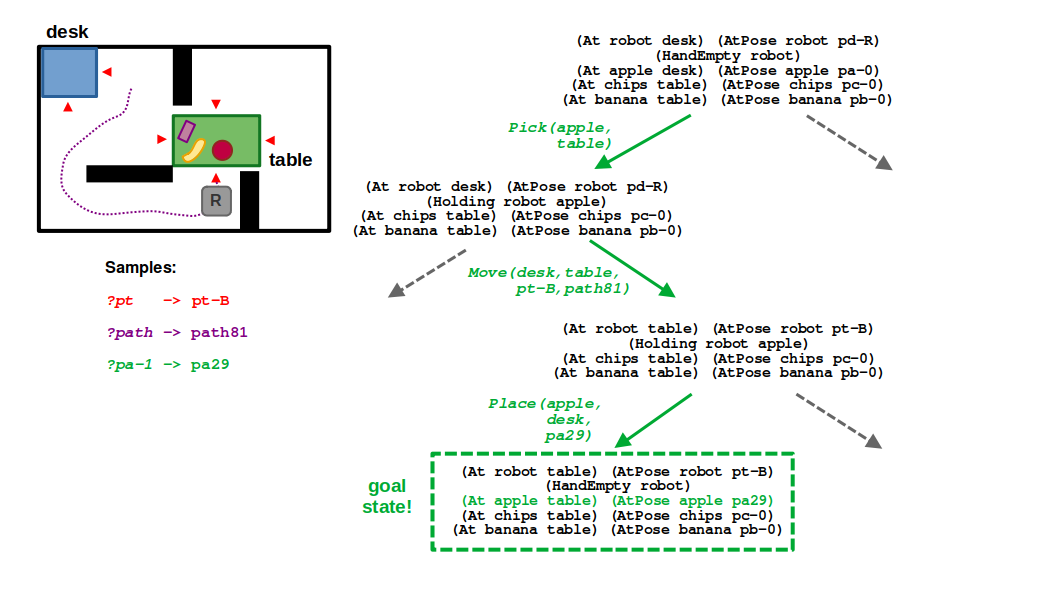
Learn the fundamentals of integrated task and motion planning (TAMP), and explore examples using PDDLStream, which combines symbolic task planning and sampling-based motion planning.