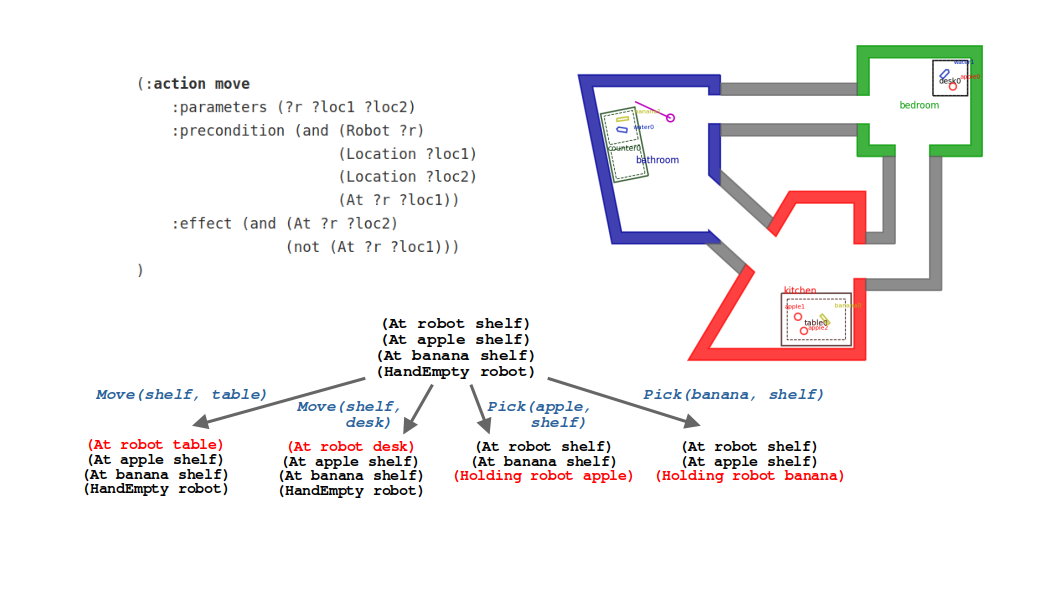
Learn the fundamentals of task planning for robotics applications, with a focus on Planning Domain Definition Language (PDDL).
Author Archives: Sebastian Castro
Building a Python Toolbox for Robot Behavior
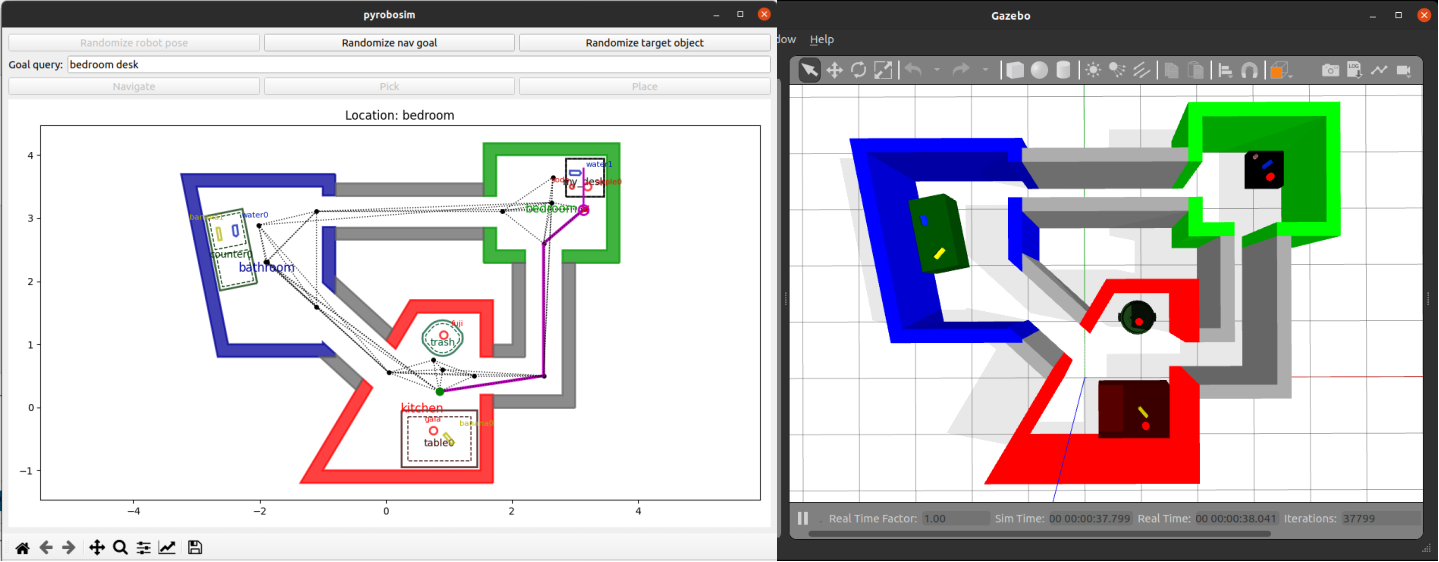
Find out about the initial development of pyrobosim: A ROS2 enabled 2D mobile robot simulator for behavior prototyping.
2021 In Review, Part 2: A Career Stretch
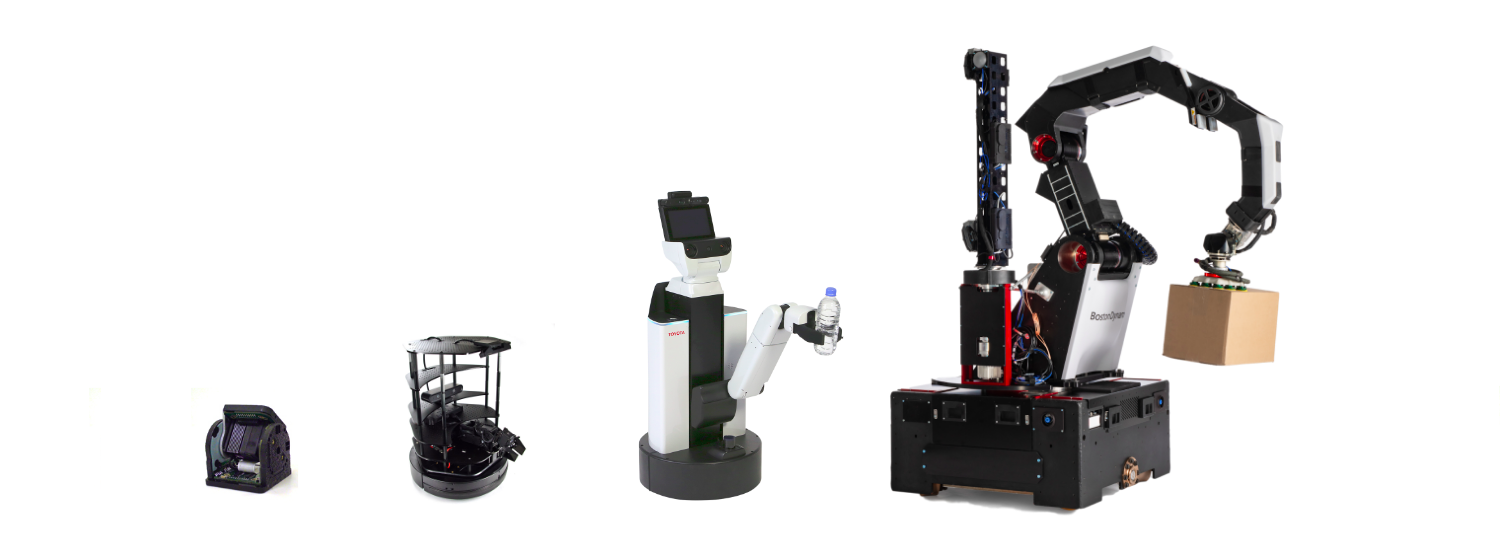
Sebastian discusses the career path that led him to work on the Stretch robot at Boston Dynamics, and highlights the differences between this job and his previous roles.
2021 in Review, Part 1: Research Projects at MIT CSAIL
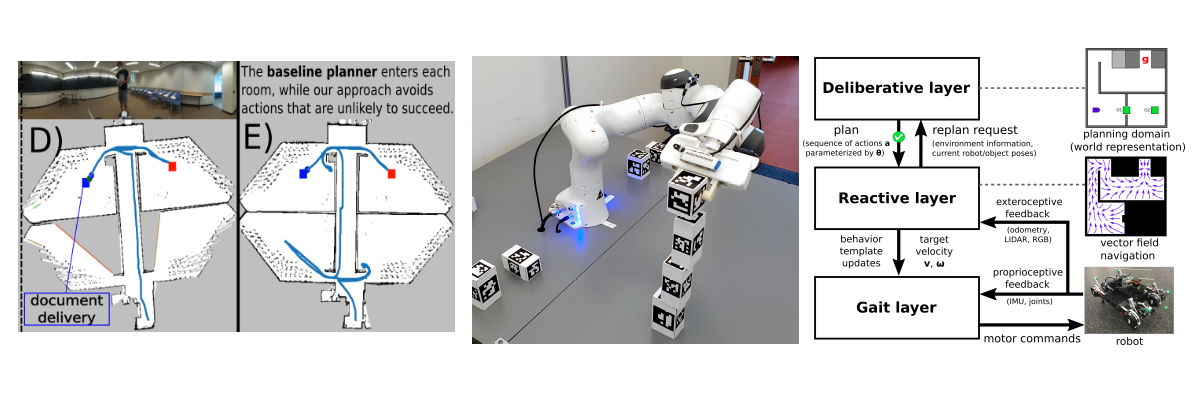
Sebastian discusses 3 of his major collaborative projects at MIT CSAIL, which focus on learning and planning under uncertainty.
Introduction to Behavior Trees

This post introduces behavior trees for designing and managing the execution of complex behaviors in autonomous systems. This includes robotics examples, software library recommendations, and comparisons to finite-state machines.
A Guide to Docker and ROS
Learn best practices for using Docker in container-based development in robotics workflows including the Robot Operating System (ROS).
2020 in Review: Home Service Robotics at MIT CSAIL
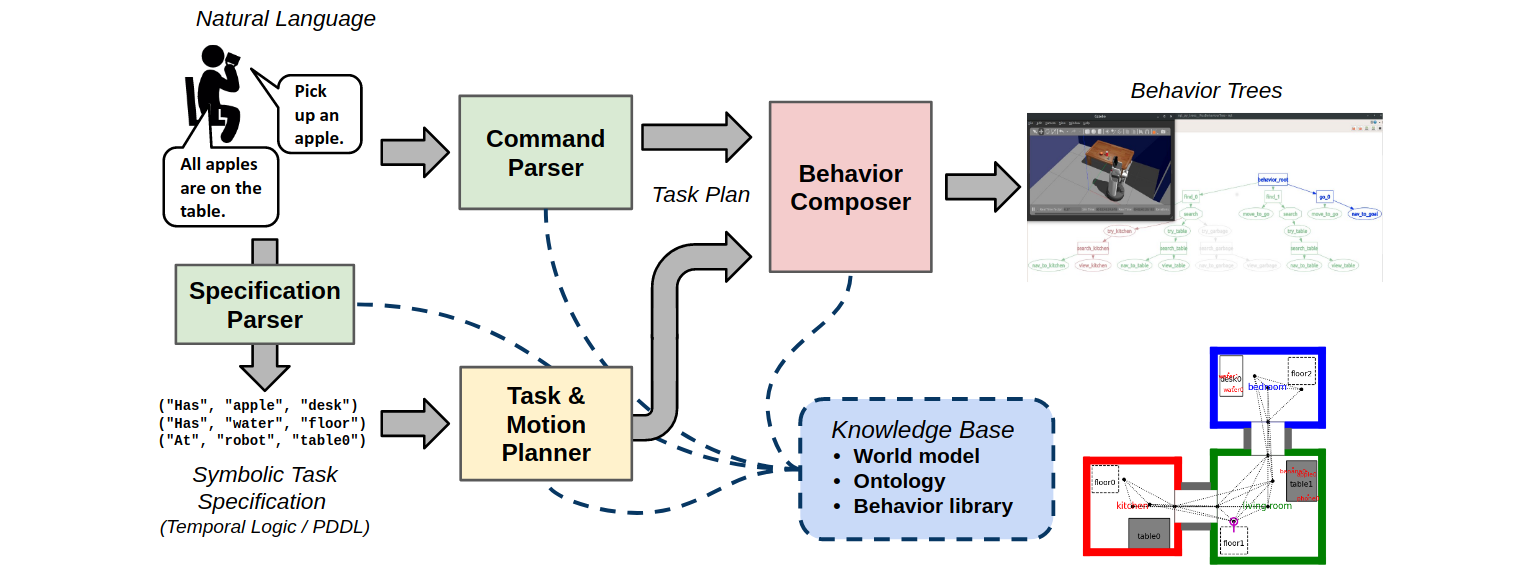
Learn about Sebastian’s major project of 2020 at MIT CSAIL. This consists of a task and motion planning framework for a mobile manipulation platform for home service robotics.
Object Detection and Instance Segmentation with Detectron2

Learn how to use the Detectron2 library to train object detection and instance segmentation models on your own dataset.