
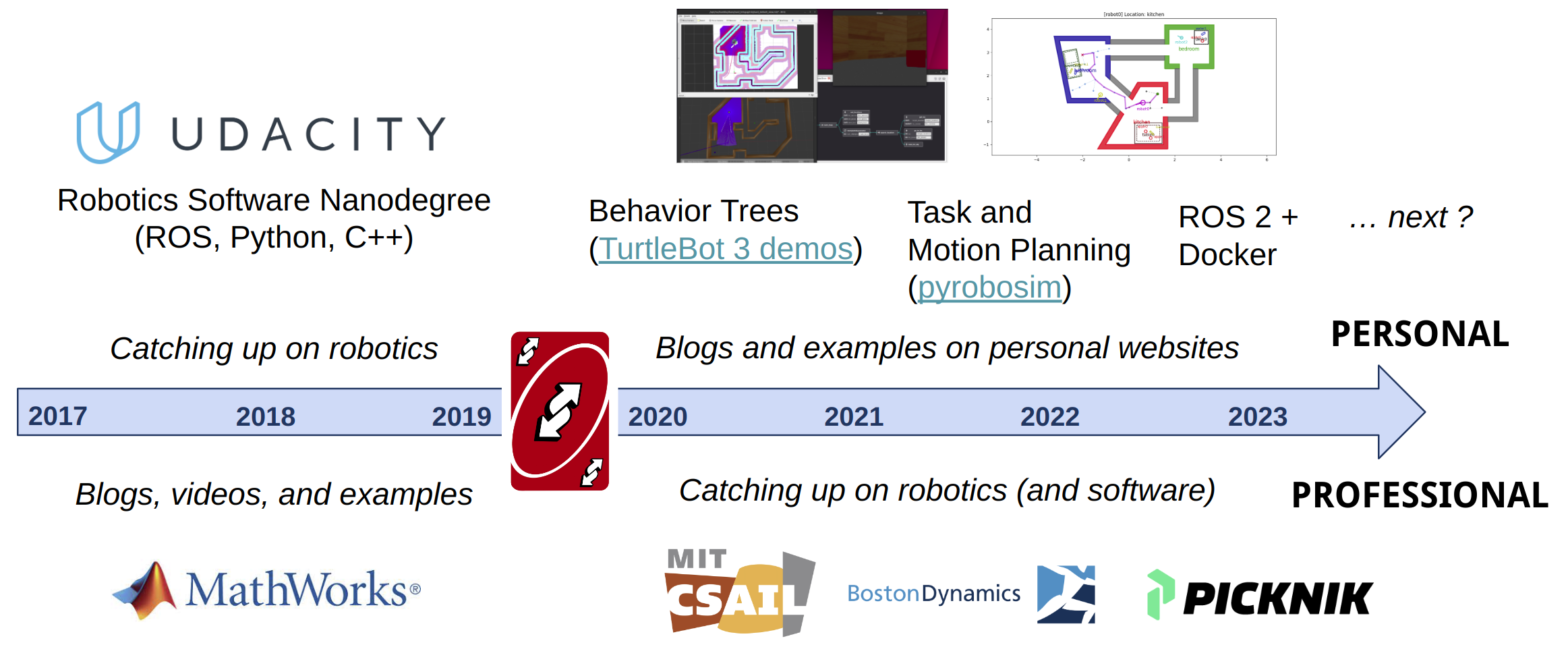
Sebastian summarizes his open-source and community contributions in 2024 and reflects on returning to support robotics research after years of software engineering experience.
Category Archives: Software Development
ROSCon 2024: Highlights from Odense

Read about Sebastian’s experiences at ROSCon 2024 in Odense, Denmark.
How Do Robot Manipulators Move?
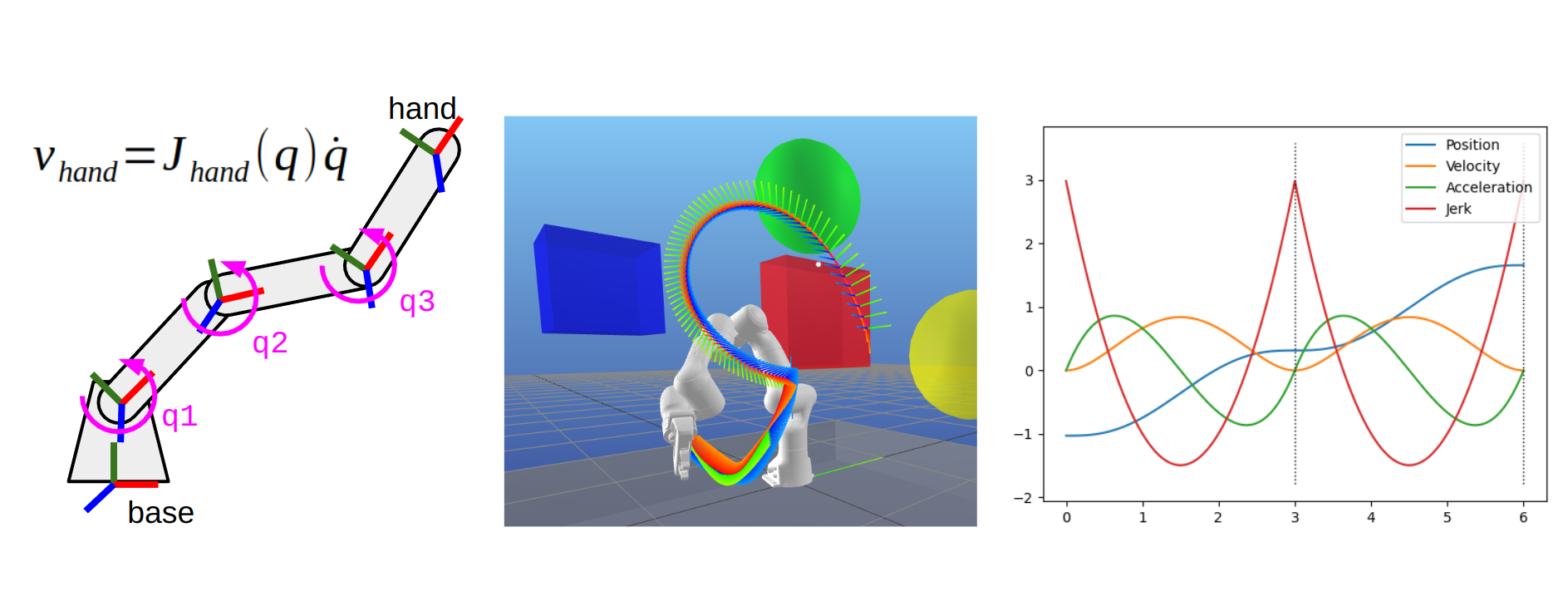
This article describes all the components needed to build a motion planning stack for a robot manipulator. You will learn the basics of inverse kinematics, motion planning, and trajectory generation, as well as model representations and common software packages you should know about.
2023 In Review: Senior Engineer
Sebastian summarizes his open-source and community contributions in 2023 and reflects on his experience as a senior engineer at a small company with an open-core model.
An Updated Guide to Docker and ROS 2

This post introduces best practices for using use Docker with ROS 2. This includes multi-stage builds, working graphics in containers, Docker Compose, and developer containers.
2022 in Review: The Year of ROS 2
Welcome to my 2022 recap. This year was quite busy — a little too busy, actually — and as such went by extremely quickly. I had the privilege of being featured in two video series this past year. First was the Learn Robotics and AI podcast episode hosted by Chandandeep Singh, which was recorded atContinue reading “2022 in Review: The Year of ROS 2”
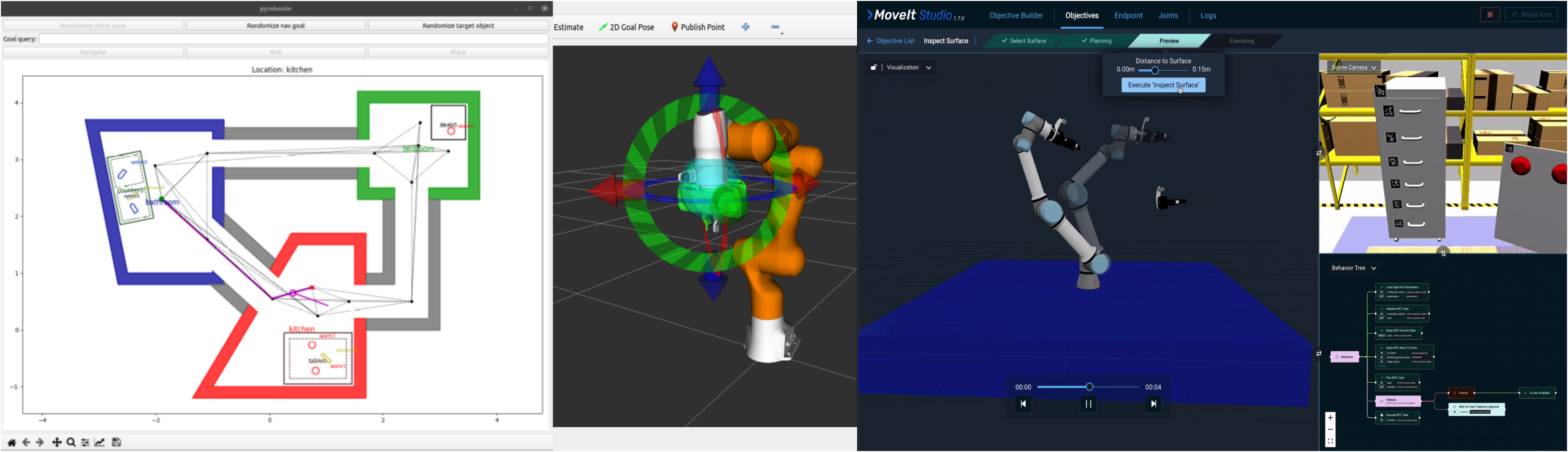
Building a Python Toolbox for Robot Behavior
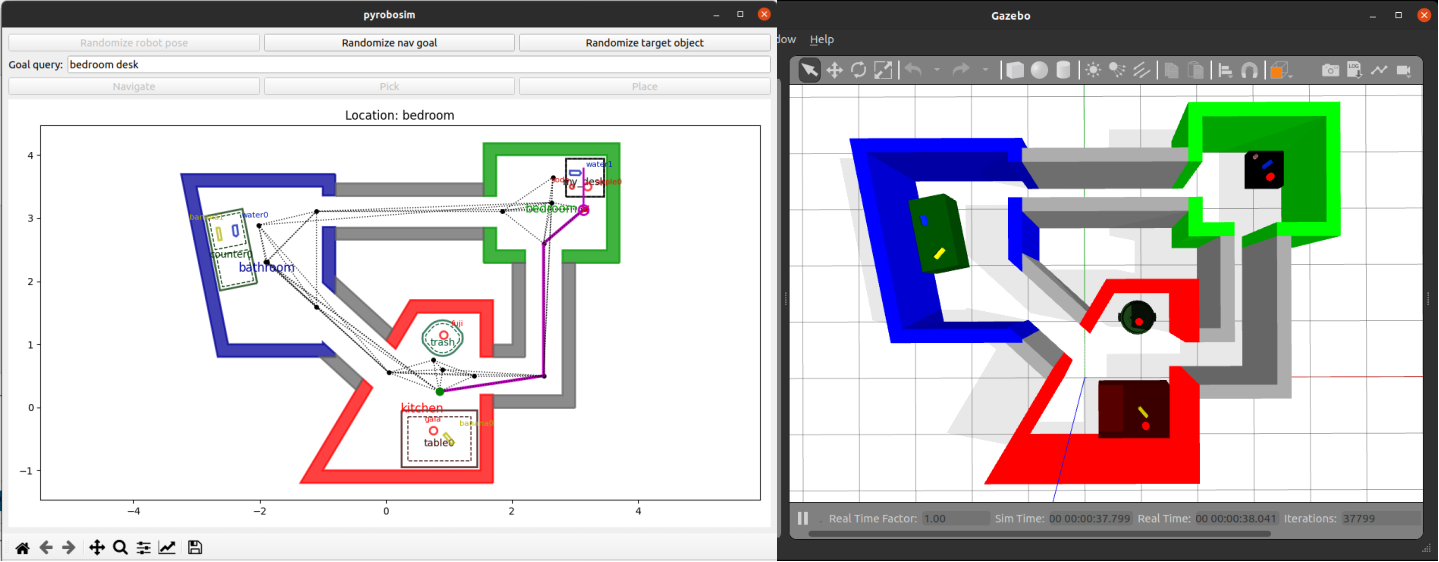
Find out about the initial development of pyrobosim: A ROS2 enabled 2D mobile robot simulator for behavior prototyping.
2021 In Review, Part 2: A Career Stretch
Sebastian discusses the career path that led him to work on the Stretch robot at Boston Dynamics, and highlights the differences between this job and his previous roles.
Introduction to Behavior Trees

This post introduces behavior trees for designing and managing the execution of complex behaviors in autonomous systems. This includes robotics examples, software library recommendations, and comparisons to finite-state machines.
A Guide to Docker and ROS
Learn best practices for using Docker in container-based development in robotics workflows including the Robot Operating System (ROS).