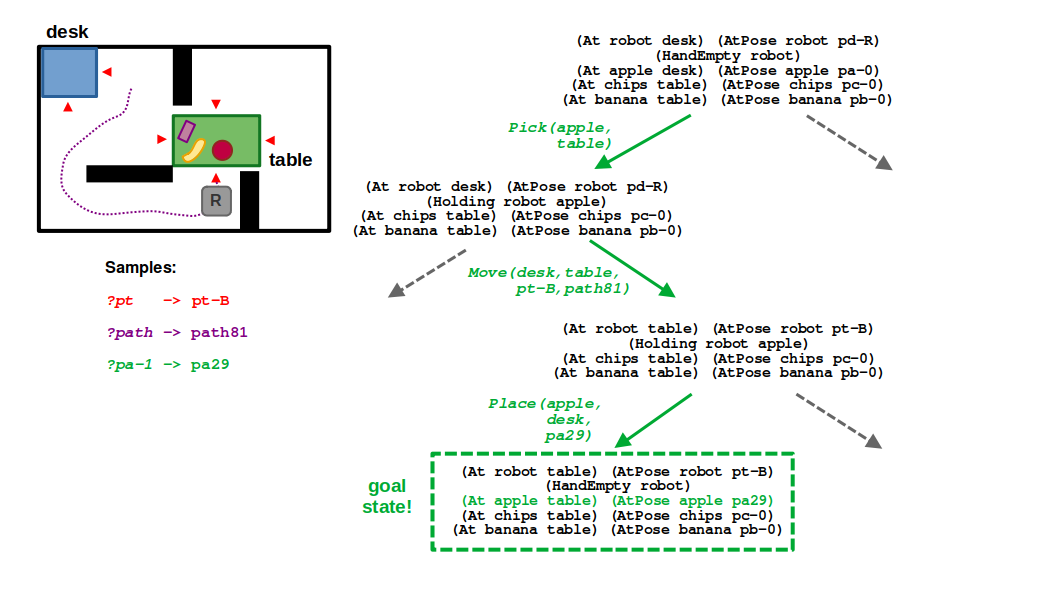
Learn the fundamentals of integrated task and motion planning (TAMP), and explore examples using PDDLStream, which combines symbolic task planning and sampling-based motion planning.
Tag Archives: pddlstream
2020 in Review: Home Service Robotics at MIT CSAIL
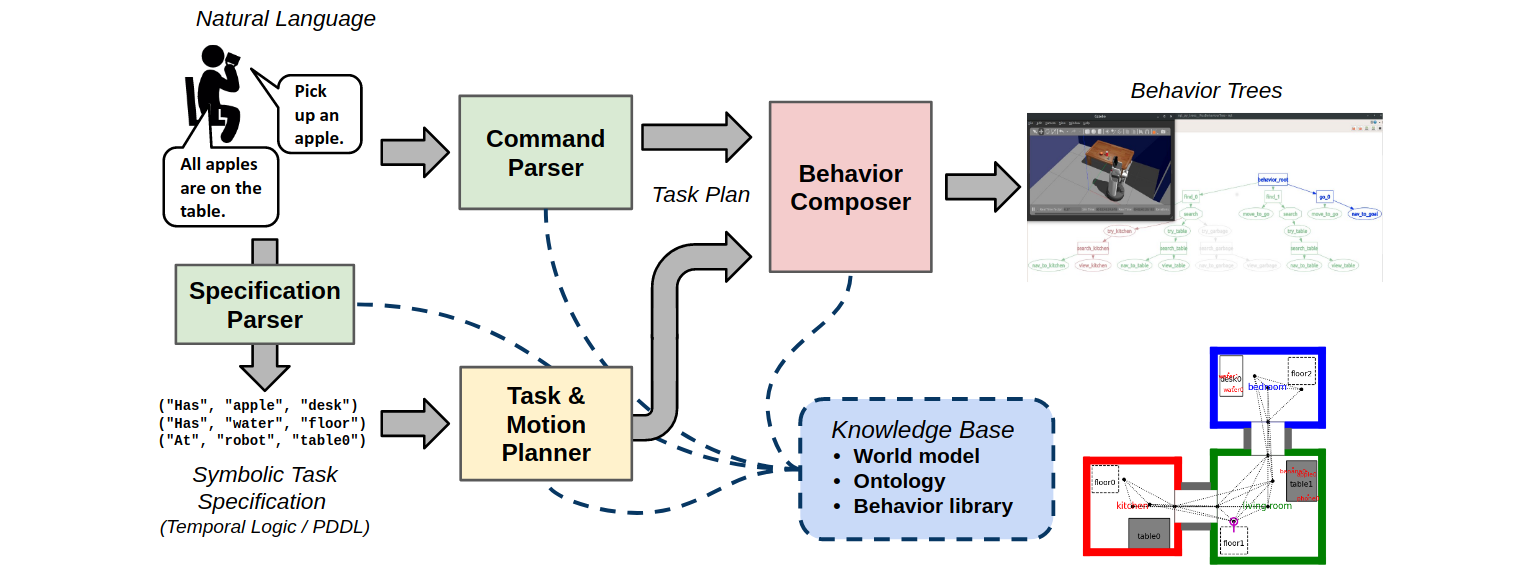
Learn about Sebastian’s major project of 2020 at MIT CSAIL. This consists of a task and motion planning framework for a mobile manipulation platform for home service robotics.