Welcome to my 2022 recap. This year was quite busy — a little too busy, actually — and as such went by extremely quickly. I had the privilege of being featured in two video series this past year. First was the Learn Robotics and AI podcast episode hosted by Chandandeep Singh, which was recorded atContinue reading “2022 in Review: The Year of ROS 2”
Tag Archives: Task and Motion Planning
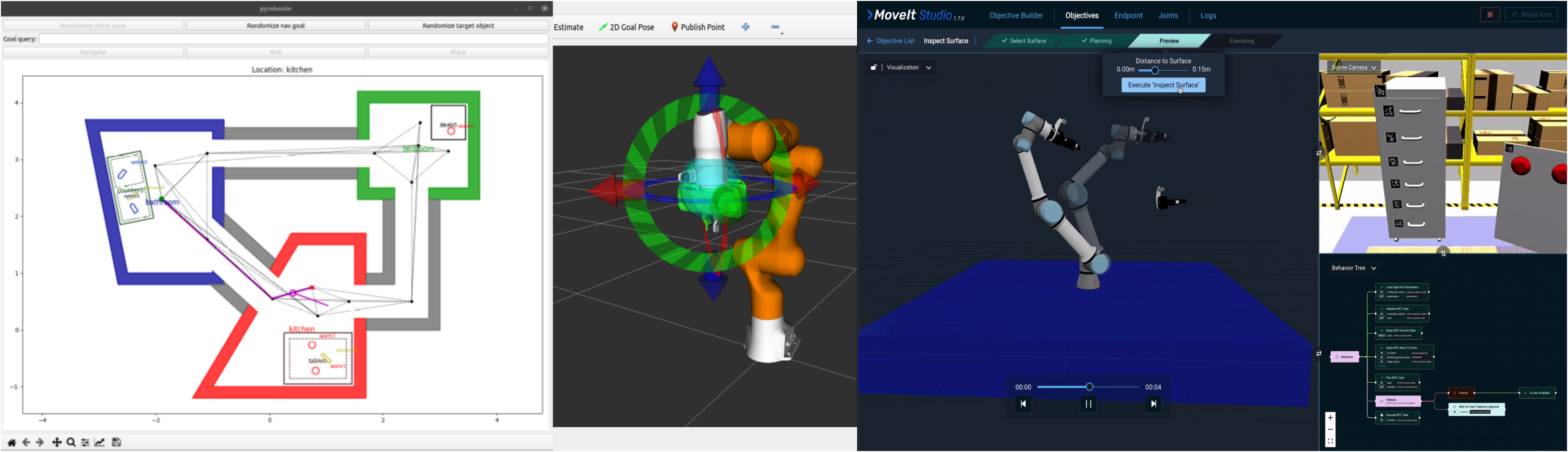
Integrated Task and Motion Planning in Robotics
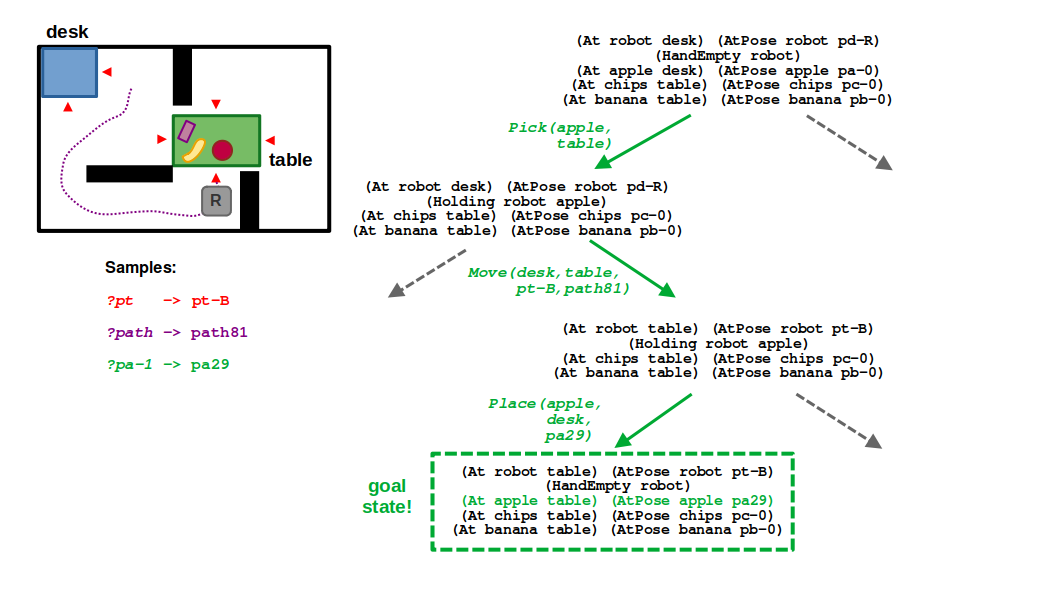
Learn the fundamentals of integrated task and motion planning (TAMP), and explore examples using PDDLStream, which combines symbolic task planning and sampling-based motion planning.
Building a Python Toolbox for Robot Behavior
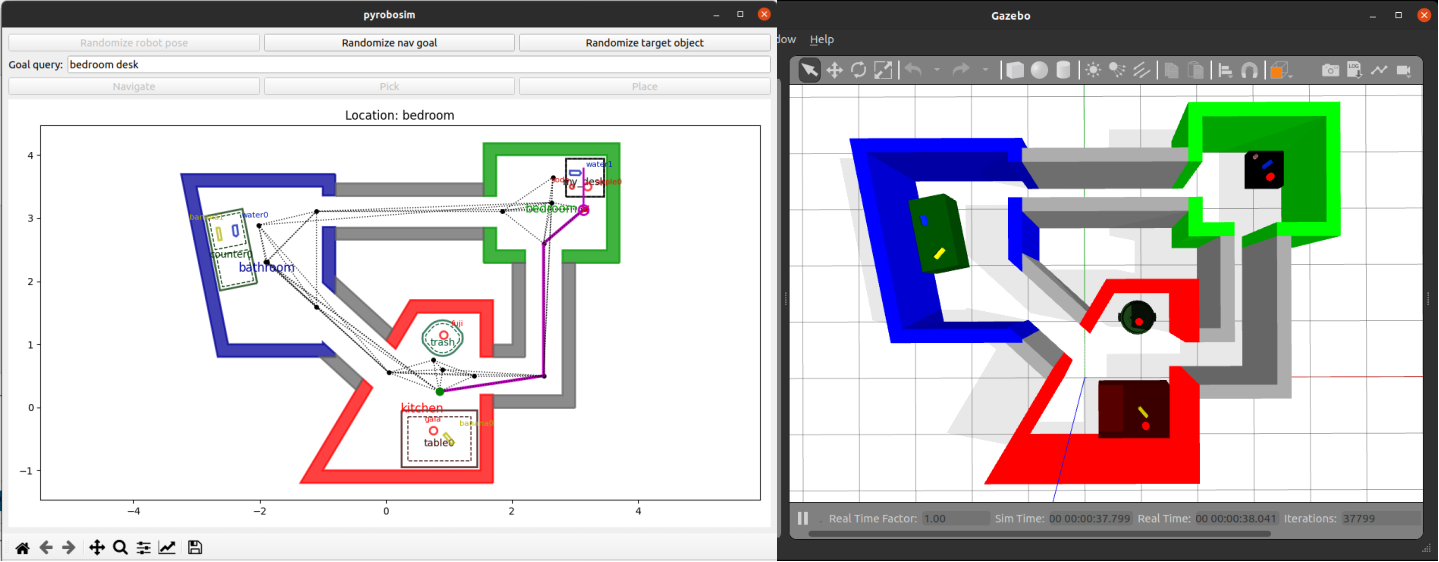
Find out about the initial development of pyrobosim: A ROS2 enabled 2D mobile robot simulator for behavior prototyping.
2021 in Review, Part 1: Research Projects at MIT CSAIL
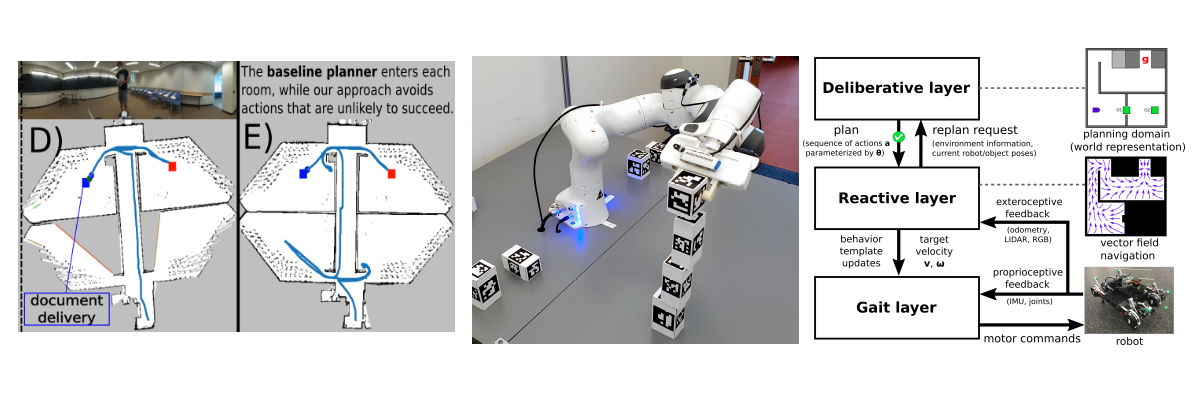
Sebastian discusses 3 of his major collaborative projects at MIT CSAIL, which focus on learning and planning under uncertainty.