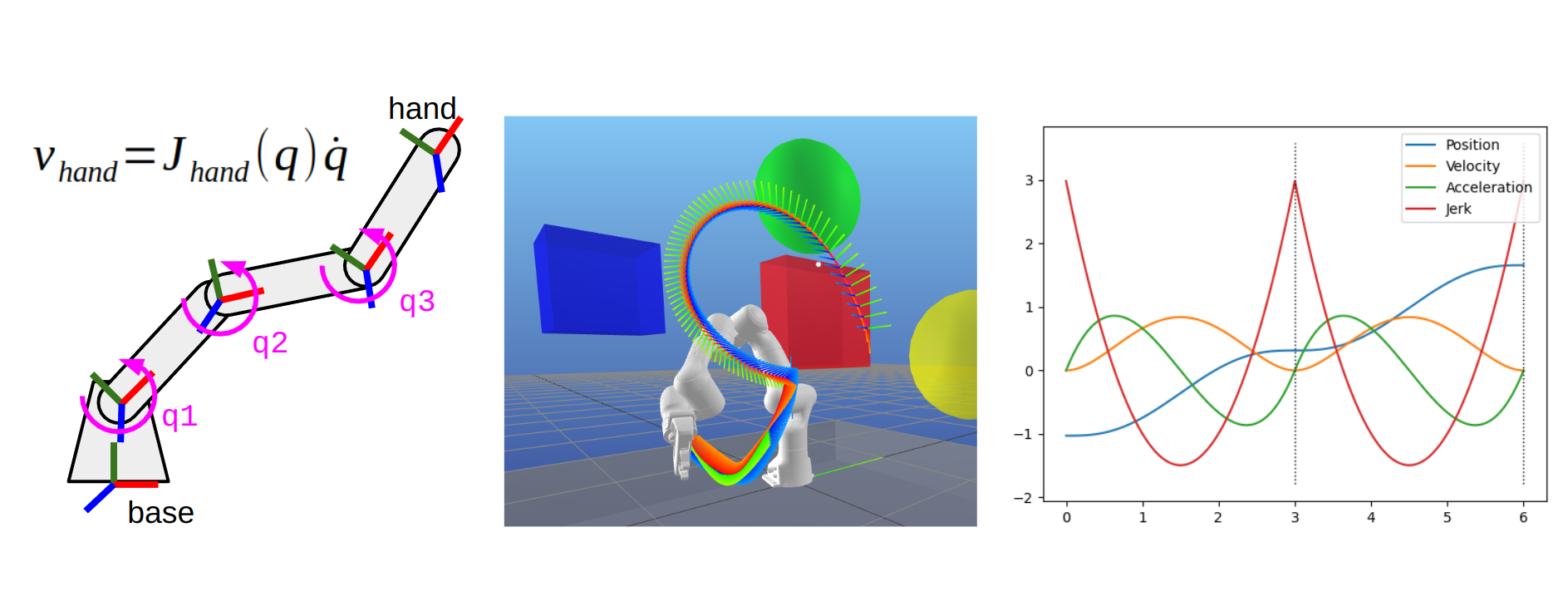
This article describes all the components needed to build a motion planning stack for a robot manipulator. You will learn the basics of inverse kinematics, motion planning, and trajectory generation, as well as model representations and common software packages you should know about.
Tag Archives: moveit
2022 in Review: The Year of ROS 2
Welcome to my 2022 recap. This year was quite busy — a little too busy, actually — and as such went by extremely quickly. I had the privilege of being featured in two video series this past year. First was the Learn Robotics and AI podcast episode hosted by Chandandeep Singh, which was recorded atContinue reading “2022 in Review: The Year of ROS 2”