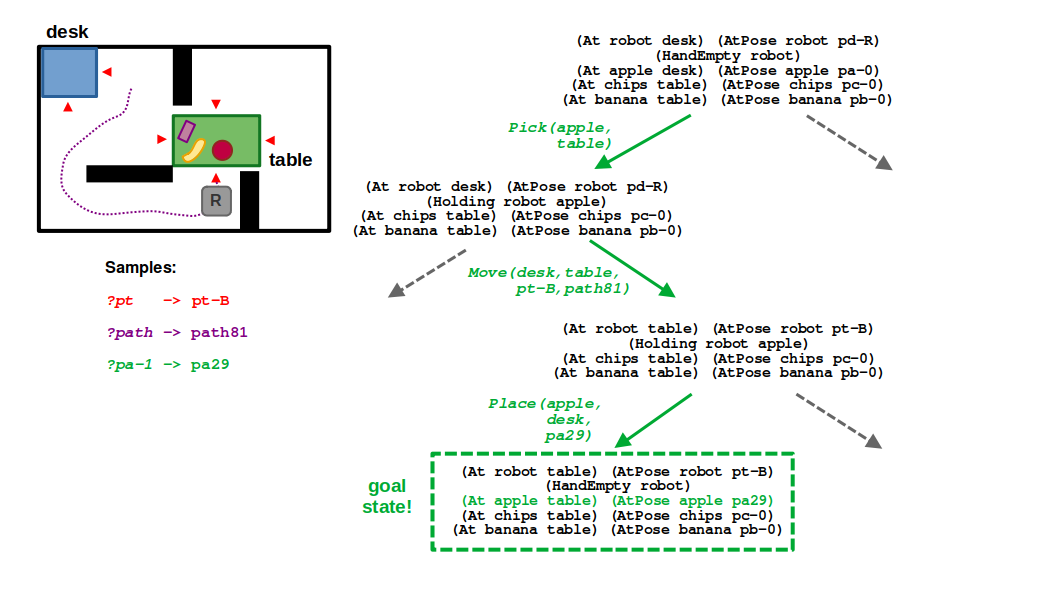
Learn the fundamentals of integrated task and motion planning (TAMP), and explore examples using PDDLStream, which combines symbolic task planning and sampling-based motion planning.
Category Archives: Navigation
2021 in Review, Part 1: Research Projects at MIT CSAIL
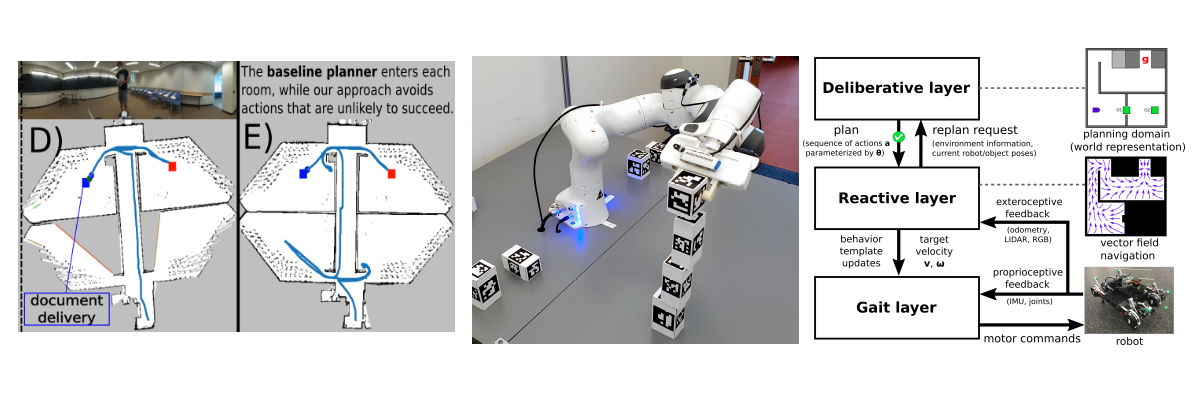
Sebastian discusses 3 of his major collaborative projects at MIT CSAIL, which focus on learning and planning under uncertainty.