
Singapore is hot. Even though I grew up in Jamaica, I’ve been in the northeast USA for 19 years (!!!) and can confidently say I forgot how to manage the heat. So, I’ve decided to sit in the nice hotel air conditioning in the middle of the day to bring you a fresh recap ofContinue reading “ROSCon 2025: Highlights from Singapore”
Category Archives: Manipulation
How Do Robot Manipulators Move?
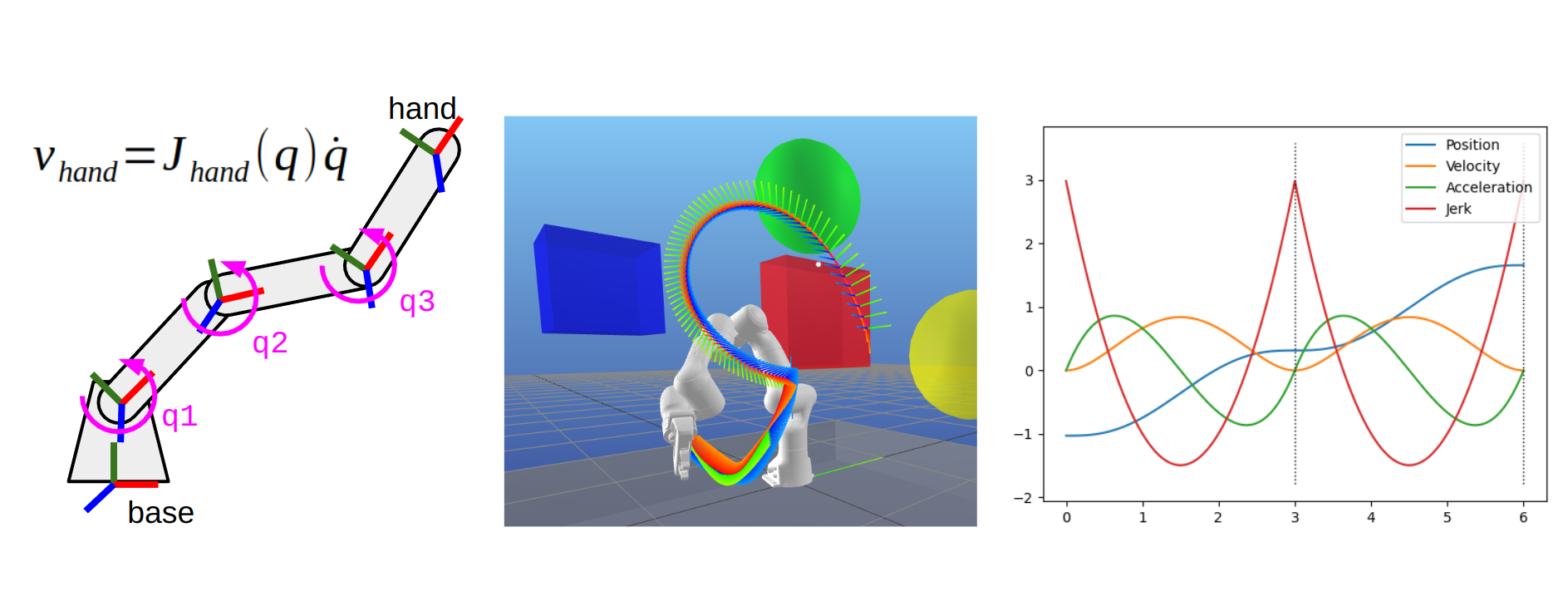
This article describes all the components needed to build a motion planning stack for a robot manipulator. You will learn the basics of inverse kinematics, motion planning, and trajectory generation, as well as model representations and common software packages you should know about.
Integrated Task and Motion Planning in Robotics
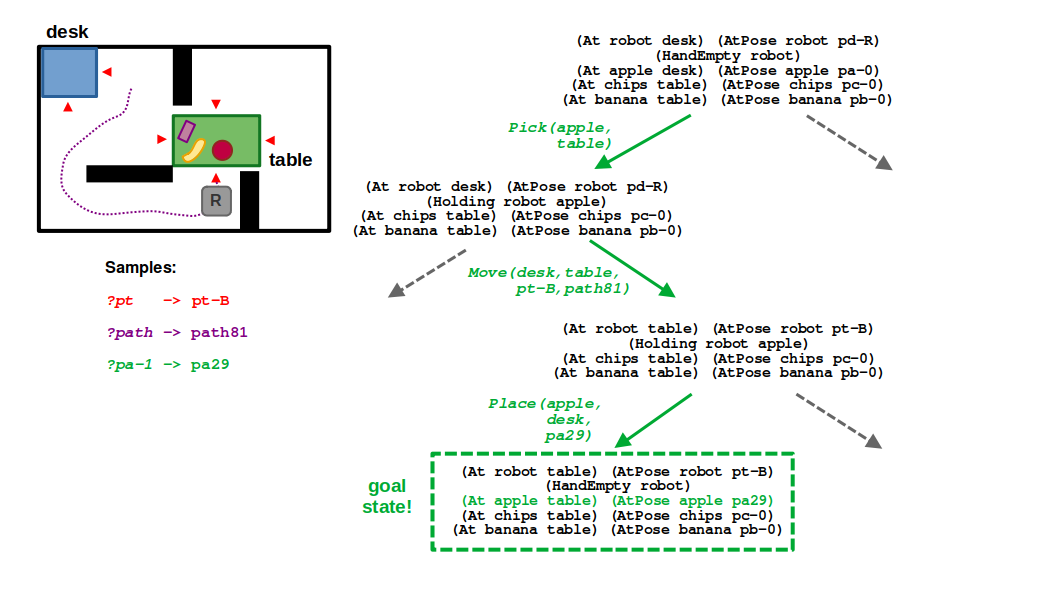
Learn the fundamentals of integrated task and motion planning (TAMP), and explore examples using PDDLStream, which combines symbolic task planning and sampling-based motion planning.
2021 in Review, Part 1: Research Projects at MIT CSAIL
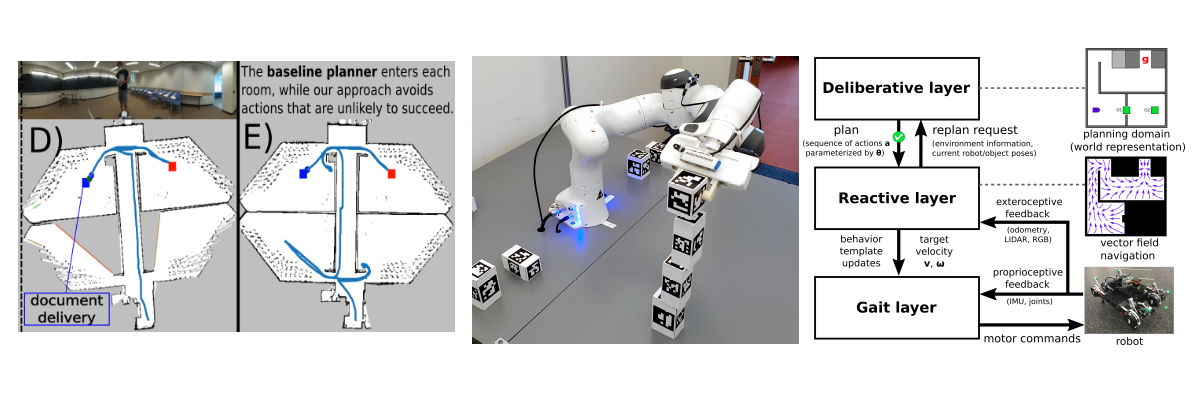
Sebastian discusses 3 of his major collaborative projects at MIT CSAIL, which focus on learning and planning under uncertainty.